
During the Open Source Hardware week of Fabricademy 2024/2025, we took the students – Carolina Beirão and Isobel Leonard – along in our pilot research again and worked on a new iteration of the Shopbot machine hack developed the year before. Our focus for this week was on three developments:
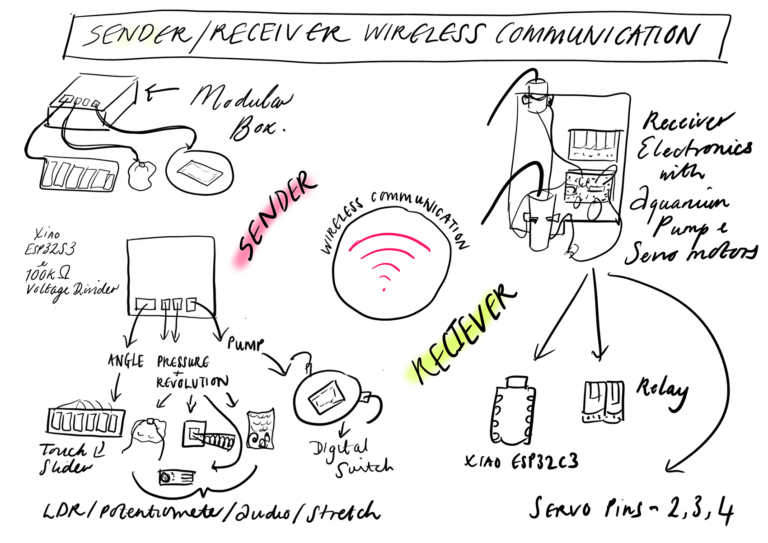
- System: a wireless interactive control system, that translates sensor and switch input to switching the ink pump on, and to different brush movements using servo motors, via ESP NOW wireless communication
- Input: a modular system where different inputs (sensors) can be attached to the wireless system, to create a variety of outputs (motion and ink control)
- Output:
-
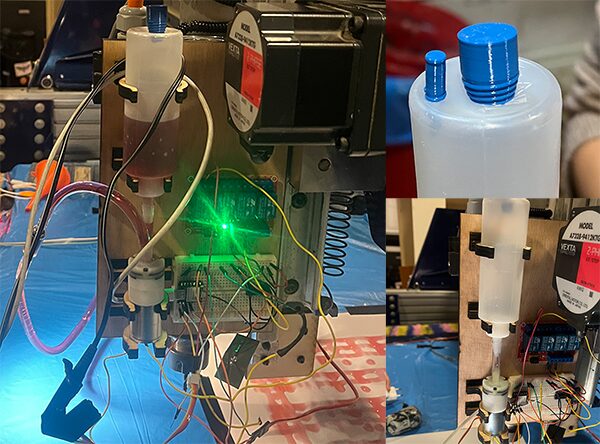
A Dye Reservoir and Pump System attached to the Shopbot, to bring dye to the brush when triggered by a switch
- An update to the interactive tool holder, so we can send sensor input to the servo motors in the tool holder. This includes up-and-down motion so we can influence pressure
-
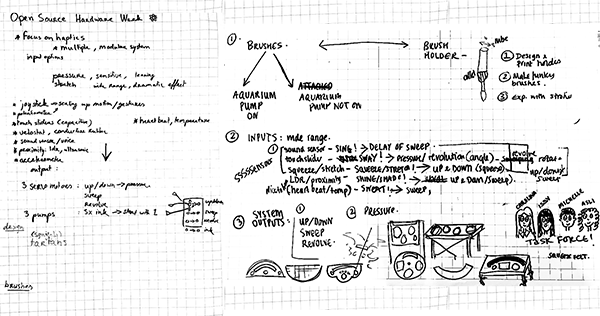
The students had a week to develop the hack and document their findings. They started with a brainstorm on paper with the things they wanted to explore:
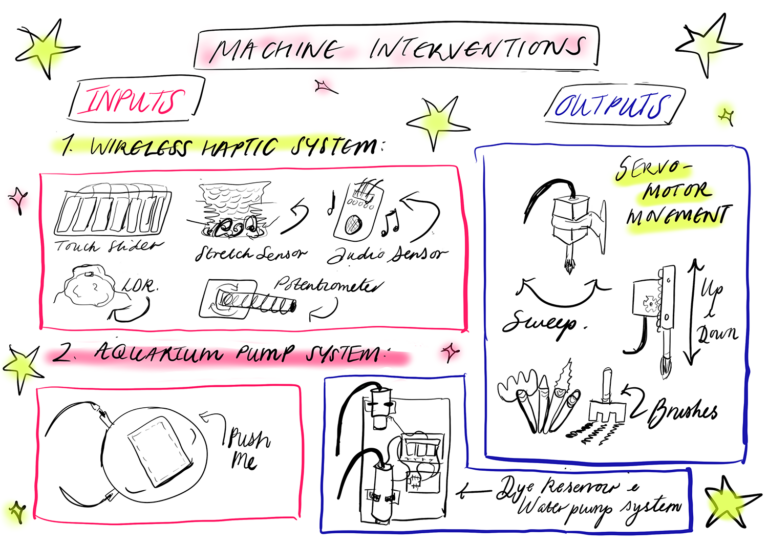
This then translated to a beautifully drawn overview of machine interventions and an overview of the system.
Team
Each member documented their contribution on their respective Fabricademy documentation blog. You can check out the documentation of the students here:
Work was divided as follows:
- Haptic sensor creation: Issy and Carolina
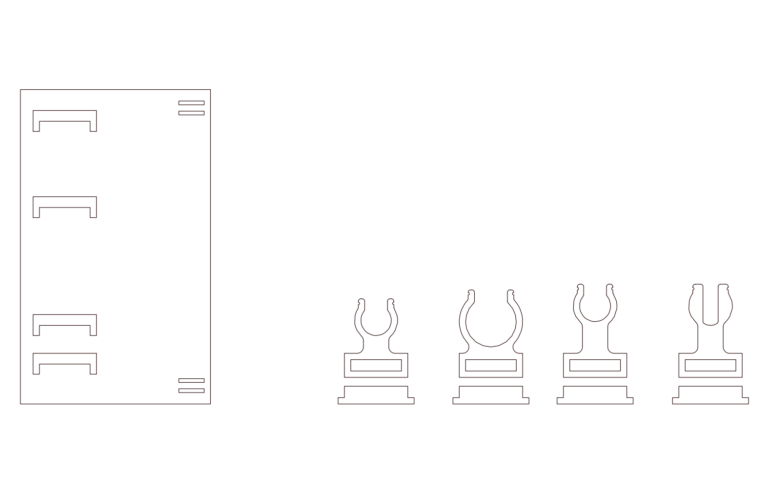
- Brush design and testing: Issy and Carolina
- Dye reservoir system machine attachment: Aslı
- Wireless, haptic receiver and sender, code and electronics: Michelle
- Shopbot code of the design to print, made in Grasshopper: Aslı
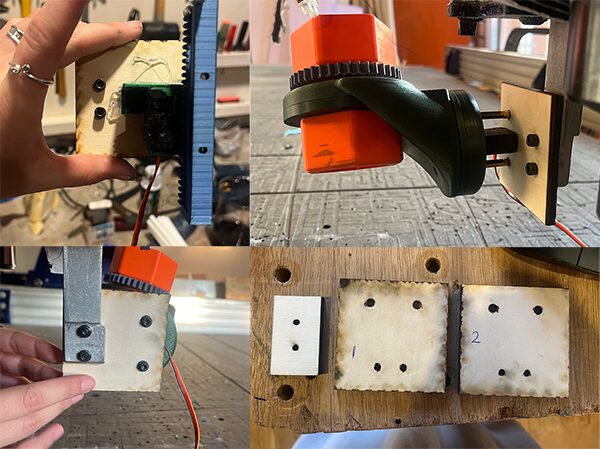
- Machine head attachment modification and mounting plate design: Issy and Carolina
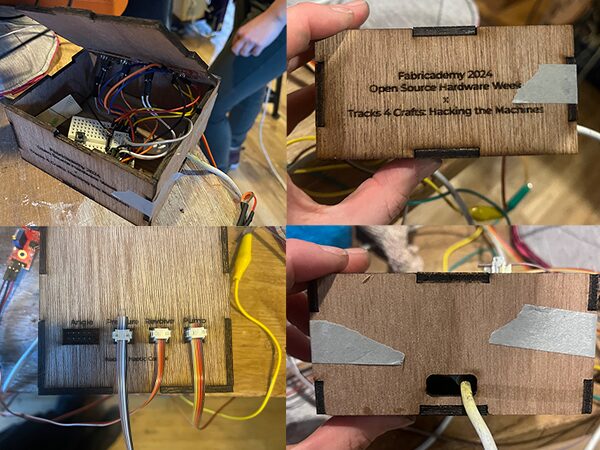
- Modular box design: Michelle
- Project management: Aslı and Michelle
Results
Input & system
You can read more about the interactive input system on our interactive devices development page here.
Output & system
The interactive tool holder only needed a minor adaptation to attach it to the Shopbot. We used the bolting points for the dust extraction (that we removed to create more space around the spindle) to attach a simple mounting plate. The students also made a linear actuator mounting plate.
Aslı developed a mounting plate to attach the water pump system and the haptic input receiver electronics to the Shopbot using velcro. She also 3D designed and printed stoppers to seal the water bottle.
Testing with the machine
The first test was only controlled with a digital switch depositing ink on the canvas.
The second test included ink deposition as well as sweeping motion.
Files
The files can be downloaded on the students’ documentation pages.
About Fabricademy
Fabricademy, Textile and Technology academy is a multidisciplinary 6-month intensive program at the intersection of digital fabrication, textiles and biology. The program explores the interrelation of human-technology-environment through the notions of embodiment, materiality, ecodesign, biodesign, performance, smart textiles and digital fabrication. Our mission is to (re)shape and (re)define the implications and applications of technology in the textile and clothing industry, from the fashion sector to the upcoming wearable market. The program offers a broad overview of the state of the art of the current industry and builds on “learning by doing” methodologies, tackling themes like personal fabrication, distributed manufacturing, industry 4.0, wearable technology, biofabrication, assistive technologies and sustainability. (via https://fabricademy.org)